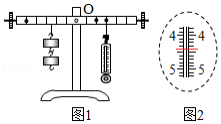
小飞用图1装置来探究杠杆的平衡条件,设弹簧测力计和钩码对杠杆的拉力分别为动力 和阻力 , 和 分别表示动力臂和阻力臂。他的实验思路是改变 、 和 ,测得杠杆平衡时所需的拉力 ,来寻找 、 、 和 四个物理量之间的关系。已知实验前已调节杠杆在水平位置平衡,弹簧测力计的量程为 ,杠杆上每一格长 。
实验次数 |
阻力 |
阻力臂 |
动力臂 |
动力 |
1 |
4 |
33 |
30 |
4.4 |
2 |
4 |
18 |
30 |
2.4 |
3 |
4 |
7.5 |
30 |
1.0 |
(1)为便于测量力臂,弹簧测力计应沿 方向拉杠杆,并使之在 位置平衡;
(2)小飞首先保持 和 不变而改变 ,所获得的实验数据如表格所示,第1次实验中弹簧测力计示数的放大图如图2所示,则 ,此时杠杆的类型与 (选填“筷子”或“老虎钳” 相同;
(3)为获得更多组数据,小飞继续进行(2)中实验,则为能顺利完成实验,在改变阻力臂 时, 应不超过 ;完成上述实验后,小飞接下来还应进行的实验有①保持 不变而改变 ;②保持 和 不变而改变 。
相关知识点
推荐试卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号